
制御入門【ARMマイコンによる応用と実践】
目次1 実践で使う制御理論1.1 準備編1.2 解析編1.3 応用編1.4 発展編1.5 番外編1.6 多角的な解釈2 モーションコントロールアプリ2.1 PWMオープンコントロール2.2 速度フィードバックコントロール […]

加速度センサ・ジャイロセンサによる姿勢検知【STM32Nucleo】
加速度センサ・ジャイロセンサ(MPU-6050)を搭載したセンサボードGY-521は 3軸加速度、 3軸ジャイロデータをインターフェースI2Cで簡単に取得でき、情報量も多く安価でお勧めなボードです。 ただし、ネット情報で […]
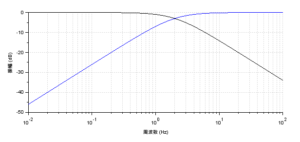
相補フィルタのしくみを解明してみる【加速度・ジャイロセンサ】
加速度・ジャイロセンサを組み合わせて使うのに相補フィルタがよく用いられますがその詳細に関する解説はあまり見かけません。どのような過程で相補フィルタの式が導かれ、式が何を意味しているかは知りたいところです。比較的単純な式の […]

パルスに追従する位置決めサーボ制御システムをマイコンで構築する
これまではあらかじめ作成したモータ位置の軌道に追従する方式として加速度指令方式での位置決めモーションコントロールを実現し、その動作の有効性を確認しました。 実際のモータ位置決めサーボシステムではパルスを位置決め指令として […]

実践で使えるDCモータの位置決め制御サーボシステムをマイコンで構築する
前回ではレゴEV3モータをテーマとして実践で使える速度サーボ運転をマイコンで実現するのに、このサイトで紹介したPI制御方式、ハイゲインフィードバック方式そして2自由度ロバスト方式を適用してそれぞれの特性を実機において検証 […]

実践で使えるDCモータの速度サーボ制御をマイコンで構築する
これまではDCモータを使ったレゴEV3モータをさまざまな制御方式のステップ応答(一定値入力)でそれぞれの特性を確認しました。実際にモータを運転する場合は一定の速度だけで使うのみならず加減速も任意に与えたパターンに追従させ […]

実践で使えるDCモータのロバスト速度制御をマイコンで構築する
ギアを介した負荷側にエンコーダが装着しているレゴEV3LモータにPI速度制御と2自由度ロバスト制御を適用してみてそれらの運転特性と効果を調べてみます。簡易モータでも実装が簡単で効果があれば積極的に採用したいものです。 目 […]

DCモータの実用的な速度フィードバック制御システムをマイコンで構築する
DCモータは市販のドライバを用いると電圧制御タイプではマイコンからのPWMパルス出力を与えるとデューティ比に応じてオープンループで簡単に速度をコントロールすることができます。 速度はデューティ比にほぼ比例しているのですが […]

DCモータのマイコンPWM出力による回転速度制御(オープンループ制御)
レゴ®マインドストーム®EV3のLモータを使って、STM32Nucleoボードにより実際にモータを動作させてみます。EV3のモータにはエンコーダが内蔵していますので速度のモニターをするのみならず、フィードバックさせること […]

マイコンで実現するフィードバック制御のための基礎知識【発展編】
マイコンで実現するフィードバック制御のための基礎知識【応用編 】では古典制御理論をベースに実践で使われるPID制御を解説しました。PID制御は感覚的にゲインを設定できるので、制御をするモデルが比較的単純なものである場合は […]