マイコンで実現するフィードバック制御のための基礎知識【応用編】
マイコンで実現するフィードバック制御のための基礎知識【解析編 】 では制御理論として制御対象を数式でモデリングをしてフィードバックを施して特性を改善させたり出力の目標値への追従性を向上させるための手段を数式により解説をしてきました。これからは制御理論を実践現場の技術として応用されているものを紹介しながら、実際にどのように活用されているかを確認していきたいと思います。
目次
PID制御とは

PID制御とは現場でよく聞かれるフィードバック制御の一種です。PIDは比例Proportional, 積分Integral, 微分Derivativeの頭文字をとったものですが、初めて耳にする人にはなんのことか意味は分かりづらいと思いますので解説しようと思います。
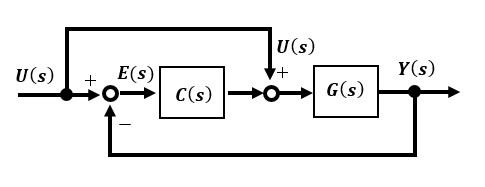
PID制御を伝達関数で表すと次のようになります。
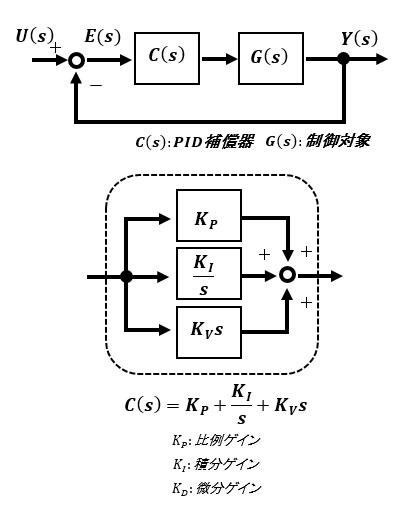
フィードバックによる目標値U(s)と出力Y(s)の差を偏差E(s)ということは前回の【解析編】で説明しました。 フィードバック制御では出力を目標値にできるだけ速やかに近づけるためにループ内に補償器C(s)を設けて追従性の向上を図るわけですが、この手段に比例P、積分I、微分Dの特性をもった補償器で制御するものをPID制御とよびます。ここで数学的な用語の比例、積分、微分がでてきましたので物理的な事例で説明します。
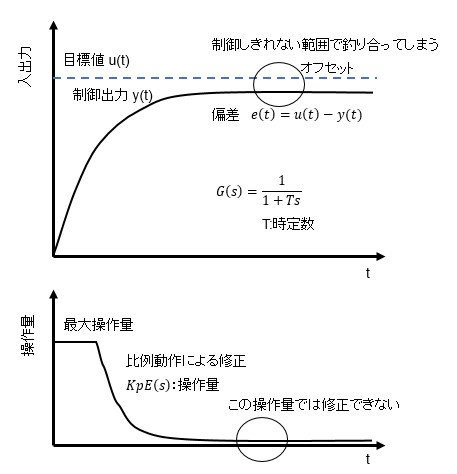
この説明をするのに、制御対象G(s)は1次遅れを持った安定しているものとします。 目標値U(s)、出力Y(s)および偏差E(s)の時間関数に相当するものをそれぞれu(t)、y(t)およびe(t)としておきます。
比例P制御:
比例動作に関しては感覚的に分かりやすいと思います。s関数で表すと、修正のための操作量は偏差E(s)に対して比例ゲインKP倍のKPE(s)となります。ここでゲインという言葉がでてきましたが、感度というとわかりやすいかもしれません。操作量は偏差(誤差)に比例しているので、時間が経過すると偏差が小さくなる方向に修正されていきます。
この比例制御だけで用が足りるように思われますが、現実では機械系の摩擦要素や、電気系の制御分解能などの影響により、この偏差は零にはならず、制御しきれない範囲で釣り合ってしまいます。つまりオフセットとして残ってしまうのが比例制御の特性でもあります。
積分I制御:
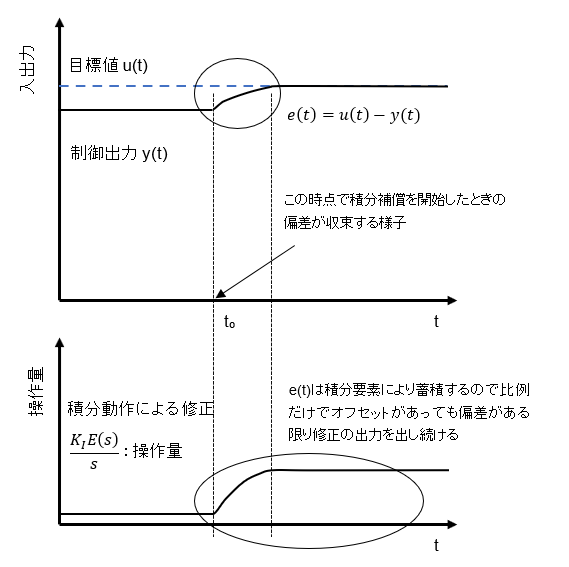
比例制御ではどうしても理論上でも実際上でも偏差のオフセット分が残ってしまいます。そこで、この偏差を零に収束させるために積分要素の入った補償器KI/sを使います。積分は時間の経過とともに偏差のオフセット分を蓄積していきますので偏差がある限り修正し続けて出力を目標値に一致させるわけです。
図において時間toまで比例制御のみの動作でそれ以降に積分制御を開始した場合の様子を表しています。toまでは定常偏差が残っていますが、積分補償器をいれることで偏差が蓄積していきますので修正をし続け、比例制御では処理しきれない定常偏差をゼロに近づけることができます。 ただし、制御対象が1次遅れ系であると積分補償器により2次遅れ系となる(伝達関数の次数が増える)のでゲインの選び方により不安定になる可能性はあります。
微分D制御:
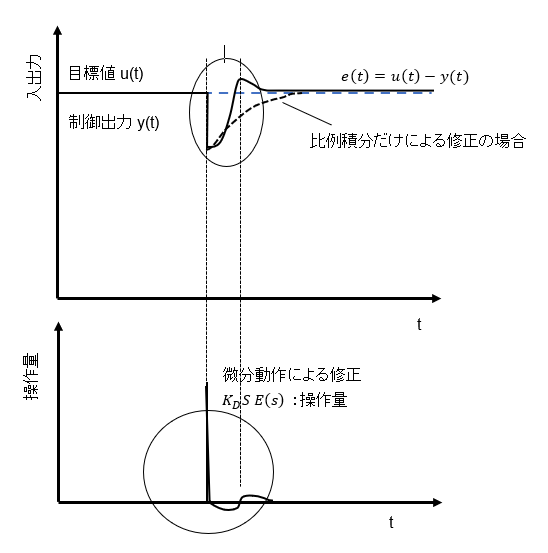
最後に微分補償器による修正です。微分補償器では偏差に時間変化がある場合に作用します。例えば、外乱などで、急激に出力が変化するとその変化に応じて修正がなされます。目的は急な変化に対応してできるだけ速やかに偏差を収束させることです。
微分補償器は積分補償器の逆の特性をもつもので微分要素の未来情報は現実的に得られないため近似微分で実現します。位相を進める特性もあるので一次遅れ等で生じた位相のずれを補正する役目もあります。
微分補償器はその性質上、温度調整器など制御対象が比較的遅めのものではよいのですが、モータ制御や電気回路内など応答の速めのシステムでは使い方を誤ると過敏に作用しすぎて不安定になるので注意が必要です。速やかな修正が必要な用途に使うと効果的です。
現場でよく使用されるPID制御はフィードバック制御を具体化したものですが、定常偏差や偏差収束について数学的な理論で示したものが、マイコンで実現するフィードバック制御のための基礎知識【解析編 】で解説した最終値定理です。双方を照らし合わせると動作がよく理解できると思います。
フィードフォワード制御
フィードフォワード制御はフィードバック制御に対するものですが、フィードバック制御の入力が目標値とフィードバック値との偏差だけであるのに対し、フィードフォワード入力は偏差以外の情報、例えば目標値などを与えます。
比較的安定しているシステムではいわゆるオープンループ制御によりフィードフォワードの入力だけを与えても機能しますが、出力の精度をより向上させたり、外乱に対して強いシステムにしたりする場合にフィードバック制御システムとします。
このようなシステムの入力にフィードフォワード情報を加えるとフィードバック情報のみに頼らないですむために、よりシステムが安定する場合があります。
システムの設計において、フィードバック制御を主体にしたフィードフォワード補償ととらえるか、オープンループのフィードフォワード制御を主体としたフィードバック補償ととらえるかは、人それぞれです。
ロバスト制御と呼ばれるもので外乱やシステム変動による不確定要素を推定する外乱オブザーバという考え方がありますが、これはフィードバック主体のシステムに推定した外乱分をキャンセルするための情報をフィードフォワード補償として与えるものです。
DCモータの速度制御
電動モータにはさまざまな種類のものがありますが、制御理論で取り上げられるものはDCモータがほとんどです。これはDCモータが電気および機械的にモデル化しやすいことと、単に動作させるだけならば専用のドライブ装置を必要とせず端子に与える直流電圧を変化させるだけで速度も変化させられる制御性の良さによるものです。また、DCモータの発生トルクは電機子電流に比例する特性から、制御機構のアクチュエータとして応用しやすい点も挙げられます。
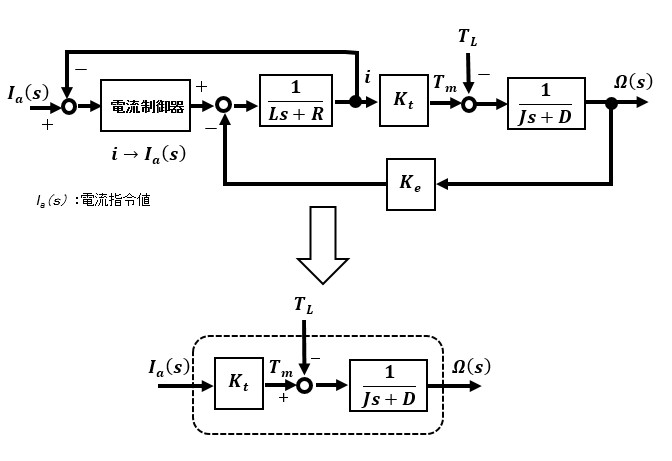
DCモータの電気回路および運動方程式により導いた伝達関数モデルによるブロック線図を作成して、その特性を確認することから始めてみましょう。【準備編】で導いたDCモータの電気系・機械系のブロック線図をまとめると次のようになります。
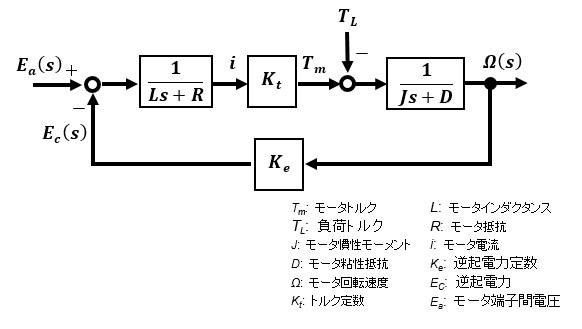
ブロック線図より、DCモータの入力をモータ端子電圧Ea(s)、出力をモータ回転速度Ω(s)とするとその伝達関数は電気系のインダクタンスLと機械系のモータ慣性モーメントJの影響で2次遅れシステムとなります。
実際にDCモータに電圧を印加すると回転速度は比較的安定しており、振動的ではありません。これはモータのインダクタンス成分による影響が機械系の慣性モーメントの影響に比べてはるかに小さいため、ほぼ1次遅れ系の特性となるからです。そこで、インダクタンスをL=0として、さらにモータ機械系の粘性摩擦Dも簡略化のためD=0として近似モデルを作成すると以下のようなモデルになります。
無負荷時 TL=0:
入力Ea(s)に対して出力回転速度Ω(s)は時定数Tmをもつ1次遅れとなっています。負荷トルクTL=0の無負荷運転では出力の回転速度は入力の電圧に対して1次遅れで比例することがわかります。このため、DCモータは印加電圧を変化させるだけで回転速度が変わるいわゆるオープン制御でも扱える手軽さがあるのです。
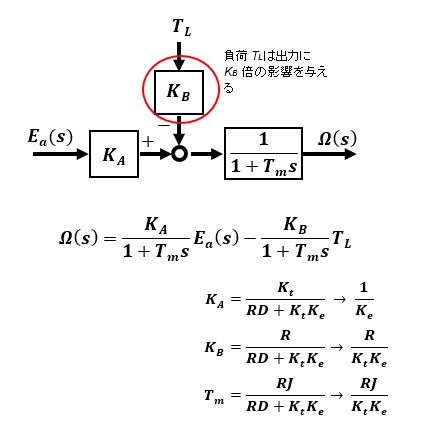
負荷がある時 TL≠0:
負荷TLが加わった時、TLのKB倍が回転速度出力に影響が出てしまいます。つまり、DCモータの印加電圧をオープン制御で変更させるだけの方式では回転速度は負荷により影響を受けてしまうので任意の速度には調整できないということになります。また、応答性はモータの電気系、機械系のパラメータにより決まってしまうところがDCモータをオープン制御で速度コントロールする性能の限界です。
そこで今回は、PI制御補償器を使った速度フィードバックにより回転数を保持するシステムの特性を確認してみたいと思います。ブロック線図は下図のとおりです。
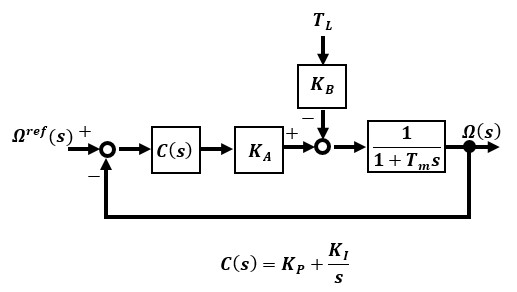
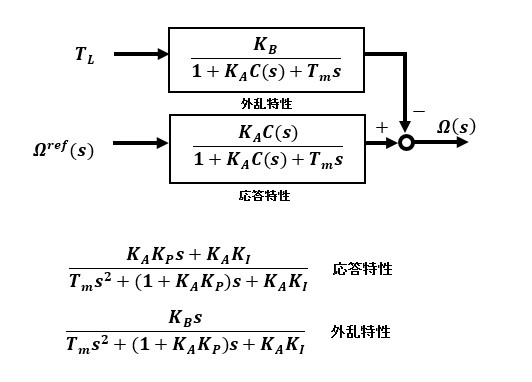
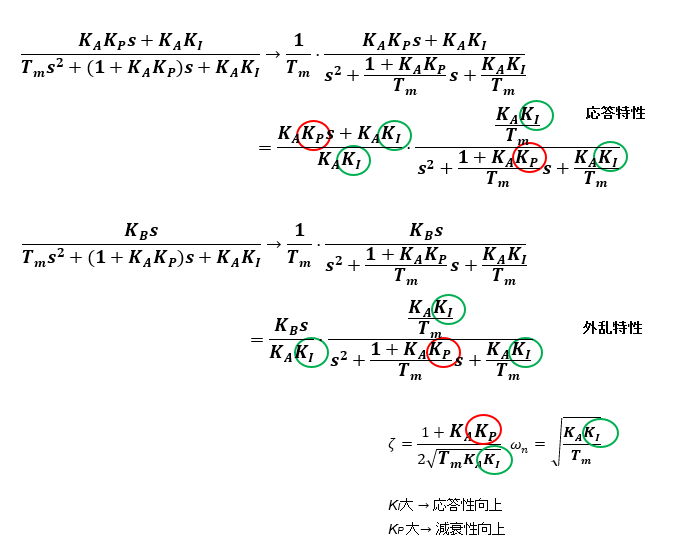
目標値Ωref(s)から出力Ω(s)までの応答特性と外乱TLから出力Ω(s)までの外乱特性は補償器に積分をいれることで2次遅れ系になっています。
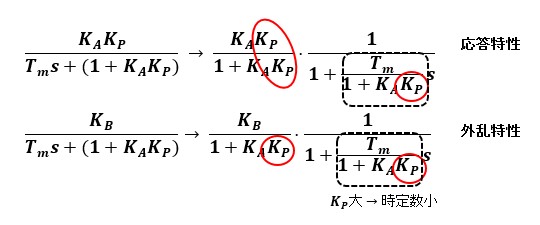
比例P制御
まず、比例補償器のみ機能させた場合(KI=0)の特性をみてみましょう。応答特性、外乱特性ともに1次遅れ系となって比例ゲインKpを調整すると時定数が小さくなり応答性を向上させることができるのがわかります。外乱特性に関しては比例ゲインKpを十分大きくとると影響が小さくなるのがわかります。ただし、1次遅れの特性である定常偏差が残ります。
比例積分PI制御
そこで、積分補償器を追加した場合の特性をみてみましょう。 応答特性、外乱特性ともに2次遅れ系となり、減衰比ζは主に比例ゲインKP、固有周波数ωnは積分ゲインKIにより設定できますのでゲインの選び方により定常偏差のない速度制御が実現できます。 外乱特性に関しては積分ゲインKIを十分大きくとると影響が小さくなるのがわかります。
もっとも、このゲインKp,KIの選択は簡単なものでなく、今回の減衰比のように互いに干渉している場合もあるのである程度の試行錯誤は必要で実際に設計する際にはシミュレーションソフトを利用して特性を確認しながら選ぶのが現実的でしょう。
DCモータの電流制御ドライブ
これまでDCモータをコントロールするための操作は端子への印加電圧Ea(s)を入力としてきました。これはDCモータが基本的に印加電圧の操作でオープン制御でも速度の可変運転ができるからです。実際にDCモータを運転するのに、電圧制御タイプのドライバを使用して電圧に比例したデューティ比のPWMパルス信号をドライバ入力として直接与えると簡単に可変速運転ができてしまいます。
DCモータを電流制御で使う理由
前章では速度運転をより安定させるために、フィードバック制御を施したときの特性が改善することが確認できました。しかしながら、モータの印加電圧を操作する電圧制御タイプでは、ちょっとした可変速のアプリケーションでは手軽でよいのですが、産業用途でより高精度な回転速度や回転角度、また回転トルクをコントロールするには性能向上に限度があります。
それは、DCモータのブロック線図モデルをみればわかるのですが、逆起電力の影響やモータ電気系の影響を受けるからです。モータ電流を直接操作する電流制御タイプではDCモータの電機子電流が駆動トルクに比例している直線特性のために電気系の影響をうけず、機械系に近い部分を直接操作できることから、電圧制御タイプに比べてより高速に特性を改善することができます。また、電圧入力の場合は電圧上限値による入力制限の影響を受けやすいため性能を発揮しにくいです。以上の理由により、より本格的なモーションコントロールのアクチュエータとしての制御操作は電流で行ったものが多いです。
電流操作でモータをドライブするには電流制御タイプのドライバを使えば最も簡単なのですが、他の方法ではモータ電流を検知して電流ループとしてフィードバック制御系をハードウェアやソフトウェアで構成しているものもあります。電流制御はドライバにもよりますが、アナログ電圧を電流指令値として使うものが一般的でマイコンではDA変換機能があるものを使用します。
DCモータドライバ
TB6612FNGはDCモータ2台まで接続できるドライバモジュールでPWMパルスの電圧指令を与える電圧制御用ドライバモジュールです。
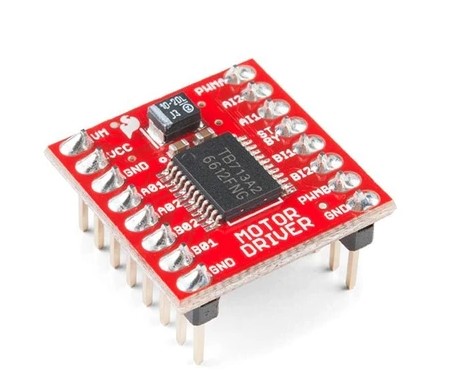
TB67H450はDCモータ1台を接続するドライバモジュールで TB6612FNG のようにPWMパルスの電圧指令を与える電圧制御とアナログ電圧を電流指令として与えて電流制御ができるドライバモジュールです。

アドバンスト制御とよばれるもの(ロバスト制御・2自由度制御)
アドバンスト制御とは古典制御や現代制御理論を拡張した概念の制御方式で、外乱による変動やモデリングの不確かさによる誤差に対して強いロバスト性(頑健性)を備えた制御のことをいいます。
これまで制御対象を数式にモデリングすることから設計評価を行うことを説明してきましたが、実際には
1.モデルのパラメータの不確かさ
2.外乱、ノイズなどによる影響
3.負荷、運転条件などによる特性の変動
などにより完全にモデリングすることはほぼ不可能です。ロバスト制御は制御すべき対象に上記のような不確かさ、変動があっても安定性を含めた制御特性が劣化しないように制御するものです。
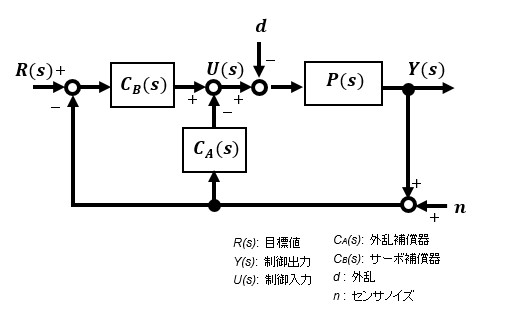
PID制御では追従特性と外乱抑制特性を改善することを試みても互いに干渉するのでゲインをどれだけ最適に選んでもどちらも満足させる特性にすることはできません。これに対して2自由度制御はロバスト制御のなかでも、これらモデリングの不確かさ、変動に対するいわゆる外乱抑制特性と制御本来の目的である追従特性を独立に設計評価できる制御システムですので双方の特性を最適にできるのが特徴です。
補償器CA(s)で外乱dやノイズnによる変動に対するロバスト特性を向上させ、補償器CB(s)で目標値R(s)に対する出力Y(s)への追従特性を向上させる構成となっており、CA(s)とCB(s)はそれぞれ独立に設定できるため、2自由度と呼ばれています。
ロバスト性を向上させる方法につきましては奥が深く、制御理論の中でもかなり高度なレベルのものですので今回は紹介だけにとどめておきます。実際に理論だけでなくマイコンアプリケーションでちょっとした検証ができるようになった段階であらためて挑戦してまとめてみたいと思います。
これまで、【準備編】【解析編】【応用編】 でマイコンによるモーションコントロールのアプリケーションを実現する上で理解しておきたい内容を講義風にまとめてみました。巷にあるような教科書の内容などを単にまとめたものではなく実践で培ったモーションコントロールの実績に基づいて必要な部分を抜粋してまとめたものですので、制御をこれから本格的に始める初心者にも大いに実践でお役にたてるものと思います。
フィードバック制御は実践で設計して利用するにあたって感覚的にパラメータを設定するものではなく、本来はしっかりとした理論に基づいて利用すべきものです。
制御入門【ARMマイコンによる応用と実践】のモーションコントロールアプリで、モーションコントロールとしてDCモータを使ったさまざまなアプリケーションによって具体的な方法を解説する予定ですので楽しみにしておいてください。